
Կոմպոզիցիա
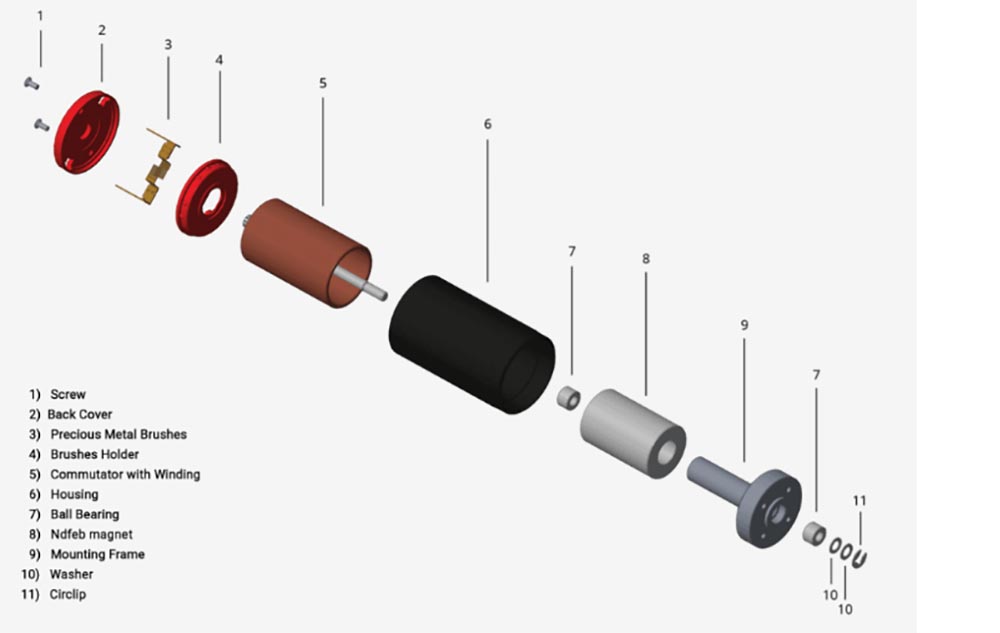
1. Մշտական մագնիսով հաստատուն հոսանքի շարժիչ։
Այն բաղկացած է ստատորի բևեռներից, ռոտորներից, խոզանակներից, պատյաններից և այլն:
Ստատորի բևեռները պատրաստված են մշտական մագնիսներից (մշտական մագնիսով պողպատ), ֆերիտից, ալնիկոյից, նեոդիմիումային երկաթից, բորից և այլ նյութերից: Կառուցվածքային ձևի համաձայն՝ դրանք կարելի է բաժանել մի քանի տեսակի՝ գլանաձև և կղմինդրաձև:
Ռոտորը սովորաբար պատրաստված է շերտավորված սիլիցիումային պողպատե թերթերից, իսկ էմալապատ մետաղալարը փաթաթված է ռոտորի միջուկի երկու ճեղքերի միջև (երեք ճեղքերում կան երեք փաթույթներ), և միացումները համապատասխանաբար եռակցվում են կոմուտատորի մետաղական թերթերի վրա։
Խոզանակը հաղորդիչ մաս է, որը միացնում է սնուցման աղբյուրը և ռոտորի փաթույթը, և ունի երկու հատկություն՝ հաղորդականություն և մաշվածության դիմադրություն: Մշտական մագնիսով շարժիչների խոզանակները օգտագործում են միասեռ մետաղական թիթեղներ կամ մետաղական գրաֆիտային խոզանակներ, և էլեկտրաքիմիական գրաֆիտային խոզանակներ:
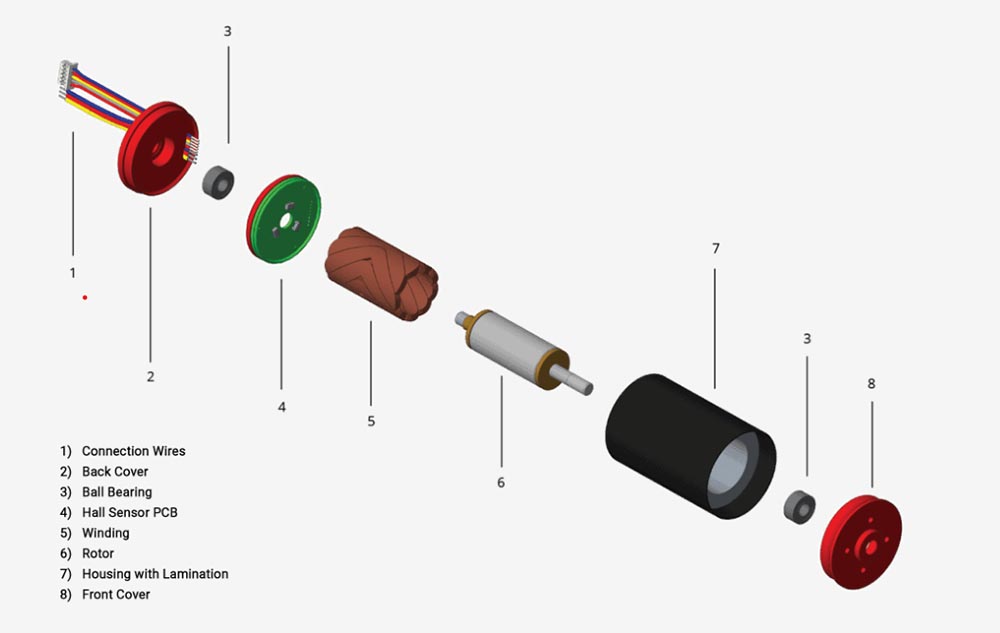
2. Անխոզանակ մշտական հոսանքի շարժիչ։
Այն կազմված է մշտական մագնիսով ռոտորից, բազմաբևեռ փաթույթային ստատորից, դիրքի սենսորից և այլն: Անխոզանակ մշտական շարժիչը բնութագրվում է անխոզանակ լինելով և օգտագործում է կիսահաղորդչային անջատիչ սարքեր (օրինակ՝ Հոլլի տարրեր)՝ էլեկտրոնային կոմուտացիա իրականացնելու համար, այսինքն՝ էլեկտրոնային անջատիչ սարքերը օգտագործվում են ավանդական կոնտակտային կոմուտատորներին և խոզանակներին փոխարինելու համար: Այն ունի բարձր հուսալիության, կոմուտացիոն կայծի բացակայության և ցածր մեխանիկական աղմուկի առավելություններ:
Դիրքի սենսորը որոշակի հերթականությամբ փոխում է ստատորի փաթույթի հոսանքը՝ ըստ ռոտորի դիրքի փոփոխության (այսինքն՝ հայտնաբերում է ռոտորի մագնիսական բևեռի դիրքը ստատորի փաթույթի նկատմամբ և առաջացնում է դիրքի չափման ազդանշան որոշված դիրքում, որը մշակվում է ազդանշանի փոխակերպման սխեմայի կողմից և այնուհետև հեռացվում: Կառավարում է հոսանքի անջատիչի սխեման և փոխում է փաթույթի հոսանքը՝ համաձայն որոշակի տրամաբանական հարաբերության):

2. Անխոզանակ մշտական հոսանքի շարժիչ։
Այն կազմված է մշտական մագնիսով ռոտորից, բազմաբևեռ փաթույթային ստատորից, դիրքի սենսորից և այլն: Անխոզանակ մշտական շարժիչը բնութագրվում է անխոզանակ լինելով և օգտագործում է կիսահաղորդչային անջատիչ սարքեր (օրինակ՝ Հոլլի տարրեր)՝ էլեկտրոնային կոմուտացիա իրականացնելու համար, այսինքն՝ էլեկտրոնային անջատիչ սարքերը օգտագործվում են ավանդական կոնտակտային կոմուտատորներին և խոզանակներին փոխարինելու համար: Այն ունի բարձր հուսալիության, կոմուտացիոն կայծի բացակայության և ցածր մեխանիկական աղմուկի առավելություններ:
Դիրքի սենսորը որոշակի հերթականությամբ փոխում է ստատորի փաթույթի հոսանքը՝ ըստ ռոտորի դիրքի փոփոխության (այսինքն՝ հայտնաբերում է ռոտորի մագնիսական բևեռի դիրքը ստատորի փաթույթի նկատմամբ և առաջացնում է դիրքի չափման ազդանշան որոշված դիրքում, որը մշակվում է ազդանշանի փոխակերպման սխեմայի կողմից և այնուհետև հեռացվում: Կառավարում է հոսանքի անջատիչի սխեման և փոխում է փաթույթի հոսանքը՝ համաձայն որոշակի տրամաբանական հարաբերության):
3. Բարձր արագությամբ մշտական մագնիսով անխոզանակ շարժիչ։
Այն կազմված է ստատորի միջուկից, մագնիսական պողպատե ռոտորից, արևային ատամնանիվից, դանդաղեցման ճիրանից, անիվի պատյանից և այլն: Հոլի սենսորը կարող է տեղադրվել շարժիչի կափարիչի վրա՝ արագությունը չափելու համար:
Խոզանակային և անխոզանակ շարժիչների համեմատություն
Խոզանակավոր և անխոզանակ շարժիչների էլեկտրիֆիկացման սկզբունքի տարբերությունը. Խոզանակավոր շարժիչը մեխանիկորեն փոխակերպվում է ածխածնային խոզանակի և փոխակերպիչի միջոցով: Անխոզանակ շարժիչը էլեկտրոնային կերպով փոխակերպվում է կարգավորիչի միջոցով՝ ինդուկցիոն ազդանշանի հիման վրա:
Խոզանակավոր և անխոզանակ շարժիչների էլեկտրամատակարարման սկզբունքը տարբեր է, և դրանց ներքին կառուցվածքը նույնպես տարբեր է: Առանցքային շարժիչների դեպքում շարժիչի պտտող մոմենտի ելքային ռեժիմը (անկախ նրանից, թե այն դանդաղեցվում է փոխանցման ռեդուկտորի մեխանիզմով) տարբեր է, և դրանց մեխանիկական կառուցվածքը նույնպես տարբեր է:
անմիջուկ խոզանակով հաստատուն հոսանքի շարժիչ
անխոզանակ անմիջուկ DC շարժիչ
Հրապարակման ժամանակը. Հունիս-03-2019